*CANAL DE AUDIO*
Una tarjeta de sonido o placa de sonido es una tarjeta de expansión para computadoras que permite la entrada y salida de audio bajo el control de un programa informático llamado controlador (en inglés driver). El típico uso de las tarjetas de sonido consiste en proveer mediante un programa que actúa de mezclador, que las aplicaciones multimedia del componente de audio suenen y puedan ser gestionadas. Estas aplicaciones multimedia engloban composición y edición de video o audio, presentaciones multimedia y entretenimiento (videojuegos). Algunos equipos tienen la tarjeta ya integrada, mientras que otros requieren tarjetas de expansión. En el 2010 el hecho de que un equipo no incorpore tarjeta de sonido, puede observarse en computadores que por circunstancias profesionales no requieren de dicho servicio.
//
Características generales
Una tarjeta de sonido típica, incorpora un chip de sonido que por lo general contiene el Conversor digital-analógico, el cual cumple con la importante función de "traducir" formas de ondas grabadas o generadas digitalmente en una señal analógica y viceversa. Esta señal es enviada a un conector (para auriculares) en donde se puede conectar cualquier otro dispositivo como un amplificador, un altavoz, etc. Para poder grabar y reproducir audio al mismo tiempo con la tarjeta de sonido debe poseer la característica "full-duplex" para que los dos conversores trabajen de forma independiente.
Los diseños más avanzados tienen más de un chip de sonido, y tienen la capacidad de separar entre los sonidos sintetizados (usualmente para la generación de música y efectos especiales en tiempo real utilizando poca cantidad de información y tiempo del microprocesador y quizá compatibilidad MIDI) y los sonidos digitales para la reproducción.
Esto último se logra con DACs (por sus siglas en inglés Digital-Analog-Conversor o Conversor-Digital-Analógico), que tienen la capacidad de reproducir múltiples muestras digitales a diferentes tonos e incluso aplicarles efectos en tiempo real como el filtrado o distorsión. Algunas veces, la reproducción digital de multi-canales puede ser usado para sintetizar música si es combinado con un banco de instrumentos que por lo general es una pequeña cantidad de memoria ROM o flash con datos sobre el sonido de distintos instrumentos musicales. Otra forma de sintetizar música en las PC es por medio de los "códecs de audio" los cuales son programas diseñados para esta función pero consumen mucho tiempo de microprocesador. Esta también nos sirve para teléfonos móviles en la tecnología celular del mundo moderno de tal modo que estos tengan una mayor capacidad de bulla. La mayoría de las tarjetas de sonido también tienen un conector de entrada o "Line In" por el cual puede entrar cualquier tipo de señal de audio proveniente de otro dispositivo como micrófonos, reproductores de casetes entre otros y luego así la tarjeta de sonido puede digitalizar estas ondas y guardarlas en el disco duro del computador.
Otro conector externo que tiene una tarjeta de sonido típica es el conector para micrófono. Este conector está diseñado para recibir una señal proveniente de dispositivos con menor voltaje al utilizado en el conector de entrada "Line-In".
Funcionalidades
Las operaciones básicas que permiten las tarjetas de sonido convencionales son las siguientes:
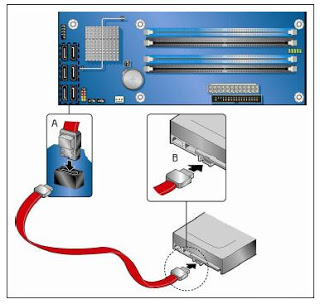
- Grabación:La señal acústica procedente de un micrófono u otras fuentes se introduce en la tarjeta por los conectores. Esta señal se transforma convenientemente y se envía al computador para su almacenamiento en un formato específico.
- Reproducción:La información de onda digital existente en la máquina se envía a la tarjeta. Tras cierto procesado se expulsa por los conectores de salida para ser interpretada por un altavoz u otro dispositivo.
- Síntesis:El sonido también se puede codificar mediante representaciones simbólicas de sus características (tono, timbre, duración...), por ejemplo con el formato MIDI. La tarjeta es capaz de generar, a partir de esos datos, un sonido audible que también se envía a las salidas.
Aparte de esto, las tarjetas suelen permitir cierto procesamiento de la señal, como compresión o introducción de efectos. Estas opciones se pueden aplicar a las tres operaciones.
Componentes
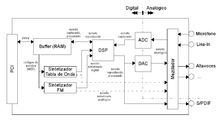
Esquema de una tarjeta de sonido. La figura siguiente muestra un diagrama simplificado de los componentes típicos de una tarjeta de sonido. En él se indica cuál es la información que viaja por cada enlace.
Interfaz con placa madre
Sirve para transmitir información entre la tarjeta y el computador. Puede ser de tipo PCI, ISA, PCMCIA, USB, etc.
Buffer
La función del buffer es almacenar temporalmente los datos que viajan entre la máquina y la tarjeta, lo cual permite absorber pequeños desajustes en la velocidad de transmisión. Por ejemplo, si la CPU no envía un dato a tiempo, la tarjeta puede seguir reproduciendo lo que tiene en el buffer; si lo datos llegan demasiado rápido, se van guardando. Lo mismo pasa en sentido inverso. Muchos ordenadores realizan la transmisión por DMA. Esto permite transportar los datos entre la tarjeta y la memoria directamente, sin la intervención de la CPU, lo cual le ahorra trabajo.
DSP (Procesador de señal digital)
Procesador de señal digital. Es un pequeño microprocesador que efectúa cálculos y tratamientos sobre la señal de sonido, liberando así a la CPU de ese trabajo. Entre las tareas que realiza se incluye compresión (en la grabación) y descompresión (en la reproducción) de la señal digital. También puede introducir efectos acústicos tales como coros, reverberación, etc., a base de algoritmos.
Los DSP suelen disponer de múltiples canales para procesar distintos flujos de señal en paralelo. También pueden ser full-duplex, lo que les permite manipular datos en ambos sentidos simultáneamente.
ADC (Conversor analógico-digital)
Conversor analógico-digital. Se encarga de transformar la señal de sonido analógica en su equivalente digital. Esto se lleva a cabo mediante tres fases: muestreo, cuantificación y codificación. Como resultado se obtiene una secuencia de valores binarios que representan el nivel de tensión en un momento concreto.
El número de bits por muestra es fijo, y suele ser 16. La frecuencia de muestreo se puede controlar desde el PC, y normalmente es una fracción de 44.1kHz.
DAC (Conversor digital-analógico)
Conversor digital-analógico. Su misión es reconstruir una señal analógica a partir de su versión digital. Para ello el circuito genera un nivel de tensión de salida de acuerdo con los valores que recibe, y lo mantiene hasta que llega el siguiente. En consecuencia se produce una señal escalonada, pero con la suficiente frecuencia de muestreo puede reproducir fielmente la original.
Sintetizador FM (modulación de frecuencia)
La síntesis por modulación de frecuencias implementa uno de los métodos de sintetizar sonido a partir de información simbólica (MIDI). Su funcionamiento consiste en variar la frecuencia de una onda portadora sinusoidal en función de una onda moduladora. Con esto se pueden conseguir formas de onda complejas con múltiples armónicos, que son lo que define el timbre. El tono y volumen del sonido deseado los determinan la frecuencia fundamental y la amplitud de la onda. Los primeros sintetizadores FM generaban una señal analógica. Sin embargo, posteriormente se han desarrollado versiones que trabajan digitalmente. Esto da más flexibilidad y por tanto más expresividad a la generación de ondas, a la vez que permite someter la señal a tratamiento digital.
Sintetizador por Tabla de Ondas
La síntesis mediante tabla de ondas es un método alternativo al FM. En vez de generar sonido de la nada, utiliza muestras grabadas de los sonidos de instrumentos reales. Estas muestras están almacenadas en formato digital en una memoria ROM incorporada, aunque también pueden estar en memoria principal y ser modificables. El sintetizador busca en la tabla el sonido que más se ajusta al requerido en cada momento.
Antes de enviarlo realiza algunos ajustes sobre la muestra elegida, como modificar el volumen, prolongar su duración mediante un bucle, o alterar su tono a base de aumentar o reducir la velocidad de reproducción. Este componente puede tener una salida analógica o digital, aunque es preferible la segunda. En general el sonido resultante es de mayor calidad que el de la síntesis FM. Alternativamente, este proceso puede ser llevado a cabo enteramente por software, ejecutado por la CPU con muestras almacenadas en disco y un algocoste de la tarjeta.
Mezclador
El mezclador tiene como finalidad recibir múltiples entradas, combinarlas adecuadamente, y encaminarlas hacia las salidas. Para ello puede mezclar varias señales (por ejemplo, sacar por el altavoz sonido reproducido y sintetizado) o seleccionar alguna de ellas (tomar como entrada el micrófono ignorando el Line-In). Este comportamiento se puede configurar por software.
Tanto las entradas como las salidas pueden proceder de la tarjeta o del exterior. El mezclador suele trabajar con señales analógicas, aunque también puede manejar digitales (S/PDIF).
Conectores
Son los elementos físicos en los que deben conectarse los dispositivos externos, los cuales pueden ser de entrada o de salida. Casi todas las tarjetas de sonido se han adaptado al estándar PC 99 de Microsoft que consiste en asignarle un color a cada conector externo, de este modo:
| Color | Función |
|---|
| | Rosa | Entrada analógica para micrófono. |
|---|
| | Azul | Entrada analógica "Line-In" |
|---|
| | Verde | Salida analógica para la señal estéreo principal (altavoces frontales). |
|---|
| | Negro | Salida analógica para altavoces traseros. |
|---|
| | Plateado | Salida analógica para altavoces laterales. |
|---|
| | Naranja | Salida Digital SPDIF (que algunas veces es utilizado como salida analógica para altavoces centrales). |
|---|
Los conectores más utilizados para las tarjetas de sonido a nivel de usuario son los minijack al ser los más económicos. Con los conectores RCA se consigue mayor calidad ya que utilizan dos canales independientes, el rojo y el blanco, uno para el canal derecho y otro para el izquierdo. A nivel profesional se utilizan las entradas y salidas S/PDIF, también llamadas salidas ópticas digitales, que trabajan directamente con sonido digital eliminando las pérdidas de calidad en las conversiones. Para poder trabajar con dispositivos MIDI se necesita la entrada y salida MIDI.
Aspectos de la señal
Muestreo de sonido
Para producir un sonido el altavoz necesita una posición donde golpear, que genera, dependiendo del lugar golpeado, una vibración del aire diferente que es la que capta el oído humano. Para determinar esa posición se necesita una codificación. Por lo tanto cuanto mayor número de bits se tenga, mayor número de posiciones diferentes se es capaz de representar.
Por ejemplo, si la muestra de sonido se codifica con 8 bits se tienen 256 posiciones diferentes donde golpear. Sin embargo con 16 bits se conseguirían 65536 posiciones. No se suelen necesitar más de 16 bits, a no ser que se quiera trabajar con un margen de error que impida que la muestra cambie significativamente.
Frecuencia de muestreo
Las tarjetas de sonido y todos los dispositivos que trabajan con señales digitales lo pueden hacer hasta una frecuencia límite, mientras mayor sea esta mejor calidad se puede obtener. Las tarjetas de sonido que incluían los primeros modelos de Apple Macintosh tenían una frecuencia de muestreo de 22050 Hz (22,05 KHz) de manera que su banda de frecuencias para grabar sonido y reproducirlo estaba limitada a 10 KHz con una precisión de 8 bits que proporciona una relación señal sobre ruido básica de solo 40 dB, las primeras tarjetas estereofónicas tenían una frecuencia de muestreo de 44100 Hz (igual que los reproductores de CD) con lo que la banda útil se extendió hasta los 20 KHz (alta calidad) pero se obtiene un sonido más claro cuando se eleva un poco esta frecuencia pues hace que los circuitos de filtrado funcionen mejor, por lo que los DAT (digital audio tape) tienen una frecuencia de conversión en sus convertidores de 48 KHz, con lo cual la banda se extiende hasta los 22 KHz.
Debe recordarse que la audición humana está limitada a los 16 ó 17 KHz, pero si los equipos se extienden más allá de este límite se tiene una mejor calidad, también que la frecuencia de muestreo (del convertidor) debe ser de más del doble que la banda que se pretende utilizar (teorema de Nyquist en la práctica). Finalmente los nuevos formatos de alta definición usan frecuencias de muestreo de 96 KHz (para tener una banda de 40 KHz) y hasta 192 KHz, no porque estas frecuencias se puedan oír, sino porque así es más fácil reproducir las que si se oyen.
Canales de sonido y polifonía
Otra característica importante de una tarjeta de sonido es su polifonía. Es el número de distintas voces o sonidos que pueden ser tocados simultánea e independientemente. El número de canales se refiere a las distintas salidas eléctricas, que corresponden a la configuración del altavoz, como por ejemplo 2.0 (estéreo), 2.1 (estéreo y subwoofer), 5.1, etc. En la actualidad se utilizan las tarjetas de sonido envolvente (surround), principalmente Dolby Digital 8.1 o superior. El número antes del punto (8) indica el número de canales y altavoces satélites, mientras que el número después del punto (1) indica la cantidad de subwoofers. En ocasiones los términos voces y canales se usan indistintamente para indicar el grado de polifonía , no la configuración de los altavoces.
Historia de las tarjetas de sonido para la arquitectura del
IBM PC
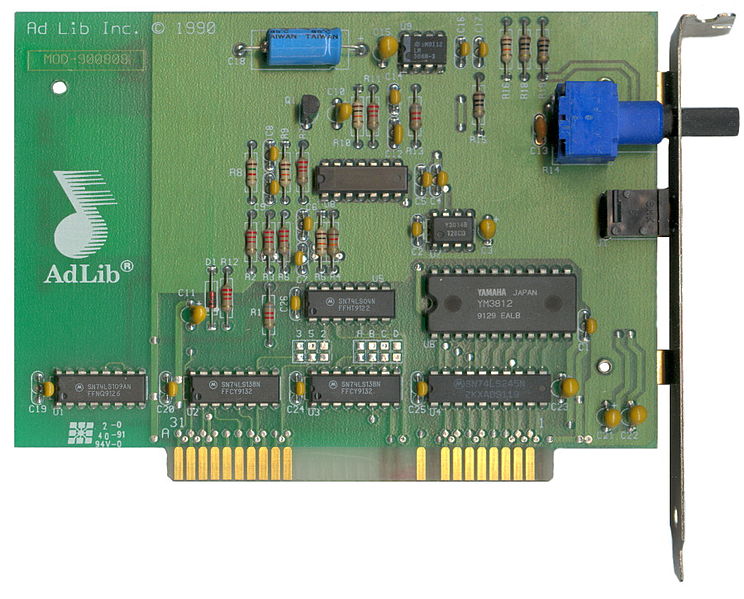
Las tarjetas de sonido eran desconocidas para los ordenadores basados en el IBM PC hasta 1988, siendo el altavoz interno del PC el único medio para producir sonido del que se disponía. El altavoz estaba limitado a la producción de ondas cuadradas, que generaba sonidos descritos como "beeps". Algunas compañías, entre las que destacaba Access Software, desarrollaron técnicas para la reproducción del sonido digital en el altavoz del PC.
El audio resultante, aunque funcional, sufría distorsiones, tenía un volumen bajo y normalmente requería de los recursos destinados al resto de procesos mientras los sonidos eran reproducidos. Otros modelos de ordenadores domésticos de los años 80 incluían soporte hardware para la reproducción de sonido digital y/o síntesis musical, dejando al IBM PC en desventaja cuando aparecieron las aplicaciones multimedia como la composición de música o los juegos.
Es importante destacar que el diseño inicial y el planteamiento de marketing de las tarjetas de sonido de la plataforma IBM PC no estaban dirigidas a los juegos, pero sí que se encontraban en aplicaciones de audio específicas como composición de música o reconocimiento de voz. Esto llevó al entorno de Sierra y otras compañías en 1988 a cambiar el enfoque de las tarjetas hacia los videojuegos.

*POLARIDAD EN CORRIENTE CONTINUA O DIRECTA*
En Electrotecnia se denomina polaridad a la cualidad que permite distinguir cada uno de los terminales de una pila, batería u otras máquinas eléctricas de corriente continua. Cada uno de estos terminales llamados polos puede ser positivo o negativo.
Antes del descubrimiento de que la corriente eléctrica es un flujo de portadores de carga eléctrica, que en los metales son electrones y circulan desde el polo negativo o cátodo al positivo o ánodo, ésta se definió como un flujo de cargas positivas y se fijó el sentido convencional de circulación de la corriente como un flujo de cargas desde el polo positivo al negativo.
Importancia de la polaridad
El conocer la polaridad del suministro de alimentación es sumamente importante ya que, en la mayoría de los casos, los pequeños dispositivos de corriente continua no suelen incorporar protecciones frente a un eventual cambio de polaridad en su alimentación, lo que puede acarrear daños irreversibles en el aparato.
Para evitar esto, y dado que generalmente la causa del problema es la colocación inadecuada de las baterías, es común que estos aparatos incorporen un diagrama que muestre cómo deben colocarse.
Asimismo, los contactos se distinguen empleándose, convencionalmente, un muelle metálico para el polo negativo y una placa para el polo positivo o bien contactos en forma de corchetes que solo permiten su abrochado en el sentido correcto. Del mismo modo, en los aparatos con baterías recargables, el transformador - rectificador tiene una salida tal que la conexión con el aparato alimentado sólo puede hacerse de una manera, impidiendo así la inversión de la polaridad.
Cuando se trata de instalaciones de gran envergadura, por ejemplo centrales telefónicas u otros equipos de telecomunicación, donde existe una distribución centralizada de corriente continua para toda la sala de equipos, se emplean elementos de conexión y protección adecuados para evitar un cambio erróneo de polaridad.

*JUMPER (FUNCIONAMIENTO)*
Función
Estas naves exploradoras, están diseñadas para atravesar el stargate, para ello están dotadas de un Sistema de Llamada a Casa situado en el centro del panel de mandos, con el que son capaces de sintonizar direcciones del stargate y así abrirlo, tiene una gran área de acción, ya que pueden activar un stargate que se encuentra a varios miles de kilómetros de distancia. Aunque el sistema de llamada del SaltaCharcos no provee de energía al stargate, utilizan la energía del sistema de llamada de este, que también se ilumina al llamar con el Puddle Jumper; la energía de posibles condensadores de energía como los de los stargates en órbita o simplemente la energía almacenada por el Stargate.
Estructura y funcionamiento
Esta nave tiene una forma cilíndrica con la parte delantera y trasera inclinadas hacia atrás, en la parte delantera se encuentra el panel de mando con la silla del piloto a la derecha y la del copiloto a la izquierda (visto de frente, como los coches de los países en los que se conduce por la derecha), tiene un cristal transparente en contraste con los Dardos, en el que se muestra numerosa información muy útil para el vuelo.
Está dividido en dos secciones: En la parte trasera hay asientos donde caben algunos pasajeros, en esta sección esta la compuerta que tiene forma de rampa, también están aquí los cristales de control de los motores, los alerones y el interruptor de la puerta. Esta parte puede ser despresurizada para introducir o sacar grandes objetos al medio exterior (espacio, océano, atmósfera) Y en la parte delantera, se encuentran los mandos de control principales, los cristales de control del Sistema de Llamada a Casa y el sistema de drones entre otros, también los asientos del piloto y copiloto, y dos pocos asientos más atrás; en esta sección hay guardados unos pequeños dispositivos antiguos de detección de señales de energía que salen cuando el piloto los necesita. Ambas secciones están divididas por una compuerta que puede abrirse y cerrarse desde ambos compartimentos.
En la parte inferior, la nave tiene una cabidad con la que puede liberar pequeños objetos al exterior sin tener que abrir la compuerta principal, también puede ser usada para enganchar cosas al Puddle Jumper.
A los lados el Puddle Jumper tiene dos juegos de alerones retráctiles, un par, el trasero, que porta los motores, y otro más pequeños que lleva los drones; ambos pares han de ser plegados cuando se cruza el stargate o la nave no podrá cruzarlo, quedándose enganchada como en el incidente de 38 Minutes.
Para pilotar esta nave, es totalmente necesario poseer el gen de los Antiguos, se pilota básicamente con la mente aunque posee unos mandos de control básicos Se conoce que cuando un Puddle Jumper va a atravesar un stargate se pone en modo automático, desacelerando, por si al otro lado no hay sitio suficiente evitando posibles impactos, en el caso de Atlantis, la nave sale del hangar situado arriba de la sala de la puerta y atraviesa está en modo automático, y cuando regresa hace lo mismo.
Armas, defensas y propulsión
El Puddle Jumper es una nave diseñada para explorar, por lo tanto sus capacidades ofensivas y defensivas son limitadas para ser un dispositivo creado por los Antiguos.
Sus armas constan de unos pocos drones, al menos ocho, localizados en una pareja de alerones retráctiles, si el aparato se queda sin estos, se vuelve inofensivo, aunque presumiblemente recarga su munición al regresar a Atlantis.
Por su parte las defensas constan de un sofisticado sistema de camuflaje, que lo hace invisible a la vista, a los sensores de los wraiths y de los Asgards, pero no a los de los Antiguos, este sistema puede unirse al poderoso escudo de Atlantis camuflándola cual Puddle Jumper; algo parecido puede hacerse con estas naves, cambiando el camuflaje por un generador de escudo, consiguiendo pasar así de una defensa pasiva a una activa, aunque gaste mucha energía.
La propulsión de esta nave está compuesta por dos motores subluz muy veloces, capaces de atravesar un sistema planetario en 15 horas, estos motores pueden operar en la atmósfera, bajo el mar y en el espacio. Cuando los alerones de los motores se cierran, la nave puede seguir moviéndose gracias seguramente a sus amortiguadores de inercia, aunque muy lentamente, esta función se usa para atravesar el stargate además de para aterrizar y despegar.
Medios en los que funcionan
Estas naves son unos vehículos realmente todoterreno, están diseñadas tanto para el vuelo en atmósfera, como para el espacial y también pueden ser utilizadas como submarinos, pudiendo llegar con sólo la estructura de su casco a resistir presiones submarinas como las que resiste el mejor de los submarinos nucleares terrestres, algo admirable para una nave espacial, y con la ayuda de su escudo, puede bajar a fosas abisales a varios kilómetros bajo el mar.
Otros tipos de Puddle Jumpers
Originalmente en Atlantis, existía un Jumper con un extraño aparato en su parte trasera, este aparato era una máquina del tiempo, aunque este Jumper fue destruido por los antiguos, otro fue encontrado en la Vía Láctea por el Sg-1. Estos Puddle Jumpers fueron construidos por un antiguo llamado Janus, el dispositivo temporal de estas naves tiene su propia fuente de energía, se controla mentalmente por alguien con el gen antiguo y puede dar saltos temporales de a partir de unos 200 años, creando un campo alrededor de la nave que le permite viajar en el tiempo.






_ubt.jpeg)