INVESTIGACION # 2 CARACTERISTICAS DEL DISCO DURO
JUMPER
_ubt.jpeg)
En informática, el jumper es un elemento para interconectar dos terminales de manera temporal sin tener que efectuar una operación que requiera herramienta adicional. Dicha unión de terminales cierra el circuito eléctrico del que forma parte.
Características
El modo de funcionamiento del dispositivo, que es lo opuesto a la configuración por "software", donde de distinto modo se llega al mismo resultado: cambiar la configuración, o modo de operación del dispositivo, recuerden que es para configurar diferentes opciones de operaciones de tu ordenador.
La principal dificultad al hacer la configuración, es la información del fabricante del dispositivo, que en algunos casos, esta solamente en el manual de operación del mismo o algunas veces, con su leyenda respectiva impresa por la placa de circuito impreso donde está montado el jumper.
Sin los jumpers, el disco duro, el lector de CD-ROM o disquetes, no funcionarían porque no tendrían definido el rol de cada uno (Primario/Master o Secundario/Esclavo/Slave). los jumpers se definen como unidades o dispositivos que permiten controlar el flujo de información que se genera a través de las autopistas.
Usos
Una de sus aplicaciones más habituales se encuentra en unidades IDE (discos duros, lectores y grabadoras de CD y DVD), donde se emplean para distinguir entre maestro y esclavo. También se usan para definir el voltaje y la velocidad del procesador (Multiplicador del FSB). así como para borrar la configuración de la BIOS, quitando durante un rato un jumper.
Sus usos pueden ser muy variados ya que son unos elementos muy fáciles de programar para todo usuario.

MASTER
Un master boot record (MBR) es el primer sector ("sector cero") de un dispositivo de almacenamiento de datos, como un disco duro. A veces, se emplea para el arranque del sistema operativo con bootstrap, otras veces es usado para almacenar una tabla de particiones y, en ocasiones, se usa sólo para identificar un dispositivo de disco individual, aunque en algunas máquinas esto último no se usa y es ignorado.
Estructura del MBR
En la práctica, el MBR casi siempre se refiere al sector de arranque de 512 bytes, o el partition sector de una partición para ordenadores compatibles con IBM (International Business Machines). Debido a la amplia implantación de ordenadores PC clónicos, este tipo de MBR se usa mucho, hasta el punto de ser incorporado en otros tipos de ordenador y en nuevos estándares multi-plataforma para el particionado y el arranque.
| 446 Bytes | Código máquina (gestor de arranque) |
| 64 Bytes | Tabla de particiones (4 registros que definen cada una de las particiones primarias) |
| 2 Bytes | Firma de unidad arrancable ("55h AAh" en hexadecimal) |
| Offset | Descripción |
|---|---|
| 0x00 | Estado[1] |
| 0x01 | Cabezal, Sector y Cilindro del primer sector en la partición[2] |
| 0x04 | Tipo de partición |
| 0x05 | Cabezal, Sector y Cilindro del último sector de la partición[2] |
| 0x08 | (4 bytes) Logical block address del primer sector de la partición |
| 0x0C | (4 bytes) Longitud de la partición, en sectores |
| Offset | Descripción |
|---|---|
| 0x00 | Bits de estado[1] (bit 0 = lista del menú del Gestor de Arranque, el resto son bits reservados) |
| 0x01 | Firma de la partición |
Cuando un dispositivo de almacenamiento de datos se ha particionado con un esquema de tabla de particiones del MBR (por ejemplo el esquema convencional de particionado de IBM PC), el MBR contiene las entradas primarias en la tabla de particiones. Las entradas de particiones secundarias se almacenan en registros de particiones extendidas, etiquetas de disco BSD, y particiones de metadatos del Logical Disk Manager que son descritas por esas entradas de particiones primarias.
Por convención, hay exactamente cuatro entradas de particiones primarias en el esquema de la Tabla de Particiones, aunque en algunos sistemas (pocos) se ha extendido ese número a cinco u ocho.[3]
Cuando un dispositivo de almacenamiento de datos se ha particionado con Tabla de Particiones GUID, el Master Boot Record no contiene la tabla de particiones (aunque contiene modelos de estructuras de datos, una protección del MBR frente a programas que sólo entienden el esquema de la Tabla de Particiones del MBR para que no creen particiones en el disco) y se usa poco debido a lo que puede afectar al particionado de disco.
MBR y arranque del sistema
En los ordenadores compatibles IBM IA-32 que usan el esquema de la Tabla de Particiones del MBR, el firmware para el arranque (bootstrapping) que se encuentra en la ROM del BIOS (actualmente usan memorias flash) carga y ejecuta el master boot record. Como los procesadores de la
modo real, el código del MBR está compuesto de instrucciones de lenguaje máquina en modo real. Ese código pasa, normalmente, el control mediante chain loading al Volume Boot Record de la partición (primaria) activa, aunque algunos gestores de arranque reemplazan ese código convencional por el suyo.
El código convencional del MBR espera que se use el esquema de la Tabla de Particiones del MBR, y escanea la lista de entradas de particiones (primarias) en la tabla de particiones buscando una que esté marcada con active flag. Luego carga y ejecuta el Volume Boot Record para esa partición (así que el Master Boot Record, como otros sectores de arranque, es un blanco para los virus que infectan el sector de arranque).
El código del MBR, modificado por algunos gestores de arranque, puede realizar una serie de tareas que son distintas según el gestor de arranque. Por ejemplo, en algunos gestores, ese código carga el resto del código del gestor de arranque desde la primera pista del disco (que es espacio libre no asignado a ninguna partición de disco) y lo ejecuta. En otros, usa una tabla de posiciones de disco, que se encuentra en el mismo espacio que el código, para localizar el código del resto del gestor de arranque y poder cargarlo y ejecutarlo. Ambas formas tienen problemas. La primera confía en el comportamiento (que no es el mismo en todas) de las utilidades de particionado de disco y la segunda requiere que la tabla de posiciones de disco se actualice una vez se hayan hecho los cambios para localizar el resto del código.
En los ordenadores que no usan procesadores IA-32, o en ordenadores que usan el esquema de la Tabla de Particiones GUID, ese esquema no es correcto, y el MBR no se utiliza en el arranque del sistema. En su lugar el firmware es capaz de entender directamente el esquema de particionado GPT y el formato de sistema de ficheros FAT, de modo que carga y ejecuta programas guardados como ficheros en la Partición del Sistema. El MBR, por tanto, no interviene en absoluto en el arranque del sistema (excepto indirectamente, en la medida en que podría contener la tabla de particiones si se ha usado el esquema de la Tabla de Particiones del MBR).
.. MBR e identificación de los discos ..
Además del código del arranque y la tabla de particiones, hay un tercer campo que puede estar contenido en un MBR: la firma del disco (de Windows NT). Tiene 32 bits para identificar unívocamente el hardware de disco (no confundir con la unidad de disco — no tienen por qué ser lo mismo en discos duros extraíbles).
La firma del disco fue introducida por Windows NT 3.5, pero actualmente la usan varios sistemas operativos, incluida las versiones de la 2.6 en adelante del kernel Linux. Windows NT usa la firma del disco como un índice en su registro, donde guarda la relación entre particiones y letras de disco. También lo usa en el fichero boot.ini para indicar las particiones con marca bootable en Windows NT.[4] GNU/Linux usa la firma del disco al arrancar para determinar la posición del volumen de arranque.
Consideraciones en la programación
Se asume que el sistema que se está programando usa un esquema MBR para BIOS, como se ha indicado antes, y la BIOS del sistema localiza un MBR válido en un disco particionado durante la secuencia de arranque (boot sequence). Como se ha visto antes, el código convencional del MBR carga y ejecuta el código del Volume Boot Record del sistema operativo (o bootloader) que se encuentra al principio de la partición activa. El MBR puede asumir simplemente que la partición activa del disco actual es desde la que se arranca o, alternativamente, puede programarse como un MBR de Arranque dual. Un MBR de arranque dual debe interactuar con el usuario para determinar desde qué partición de disco se arranca y tiene que pasarle el control al MBR de otro disco duro.
La BIOS cargará el primer MBR válido que encuentre hacia la dirección física hexadecimal 0x7C00, y salta a esa dirección. Parte de los 512 bytes del sector se reserva para la tabla de particiones y otra información (ver la tabla), así que el código del programa debe ser tan pequeño como para caber en poco más de 400 bytes de memoria. El código debe comunicarse con el usuario, examinar la tabla de particiones, o realizar tareas de gestión como activar la línea A20, o cambiar a modo irreal desde modo real. Eventualmente, el MBR necesitará realizar su tarea y cargar el programa que hará la siguiente fase del arranque, usando la llamada de la BIOS INT 13.
Normalmente, el código del sector de arranque también espera ser cargado de la dirección física 0x7C00, incluso cuando toda la memoria de las direcciones físicas entre la 0x500 y la 0x9ffff está disponible en modo real (637 Kb y medio). Cuando el MBR ya se está ejecutando desde la posición 0x7C00, una de sus primeras tareas normalmente es reubicarse en otro lugar de la memoria -- a menudo en la 0x7A00. Un Volume Boot Record tiene solamente el tamaño de un sector, lo cual no es un problema pues es fácil que el MBR cargue bastante más que sólo un sector. Algunos gestores de arranque son más grandes que un sector, así que cargar más de un sector puede acelerar el proceso de arranque
SATA
Serial ATA o SATA (acrónimo de Serial Advanced Technology Attachment) es una interfaz de transferencia de datos entre la placa base y algunos dispositivos de almacenamiento, como puede ser el disco duro, Lectores y regrabadores de CD/DVD/BR, Unidades de Estado Sólido u otros dispositivos de altas prestaciones que están siendo todavía desarrollados. Serial ATA sustituye a la tradicional Parallel ATA o P-ATA. SATA proporciona mayores velocidades, mejor aprovechamiento cuando hay varias unidades, mayor longitud del cable de transmisión de datos y capacidad para conectar unidades en caliente, es decir, insertar el dispositivo sin tener que apagar el ordenador o que sufra un cortocircuito como con los viejos Molex.
Actualmente es una interfaz ampliamente aceptada y estandarizada en las placas base de PC. La Organización Internacional Serial ATA (SATA-IO) es el grupo responsable de desarrollar, de manejar y de conducir la adopción de especificaciones estandarizadas de Serial ATA. Los usuarios de la interfaz SATA se benefician de mejores velocidades, dispositivos de almacenamientos actualizables de manera más simple y configuración más sencilla. El objetivo de SATA-IO es conducir a la industria a la adopción de SATA definiendo, desarrollando y exponiendo las especificaciones estándar para la interfaz SATA.
Historia
A principios del año 2000 se formó un grupo con el nombre de Serial ATA Working Group. Los miembros fundadores del grupo continuaron formando el Serial ATA II Working Group para seguir con el desarrollo de la siguiente generación de especificaciones para Serial ATA. La nueva organización, SATA-IO, toma las tareas de mantenimiento de las especificaciones, promoción y venta de Serial ATA. Además de crear un futuro interfaz con especificaciones de velocidad que encabecen la tecnología de almacenamiento durante la siguiente década.
El cambio de Serial ATA II Working Group a una asociación industrial formal fue tomado por el Serial ATA II Steering Committee que encontró que un beneficio comercial mutuo les daría mayor ventaja a la hora de promover cualquier actividad necesaria para la adopción de Serial ATA. La SATA-IO se dedica a construir un mercado robusto y maduro para las ofertas de Serial ATA. Y, en su caso, seguirá actividades tales como: un programa de concienciación tecnológica y de logo, laboratorios de interoperabilidad y encuentros cara a cara.
La diferencia principal entre un grupo de trabajo y una asociación industrial formal es que la segunda es una entidad independiente legalmente. Así es posible tener un presupuesto más formalizado y es capaz de amparar actividades para el desarrollo de SATA. Los miembros de SATA-IO tienen la capacidad de influir o contribuir directamente al desarrollo de las especificaciones de SATA.
Miembros
La adición de miembros a SATA-IO está abierta a nuevas compañías. Ser miembro incluye los siguientes beneficios:
- Acceso solo para miembros a la especificación y al sitio Web del desarrollo de las especificaciones.
- Elegibilidad para participar en los laboratorios de interoperabilidad de Serial ATA (Plugfests).
- Oportunidades para participar en programas de marketing y eventos, como cartas de prensa, muestras de productos en el sitio Web, etc.
- Uso de los logos SATA-IO.
- Descuentos para eventos SATA-IO.
- Promoción de la compañía y enlaces desde el sitio Web de SATA-IO.
Los promotores del grupo SATA-IO incluyen a Dell Computer Corporation, Maxtor Corporation, Seagate Technology, Western Digital Corporation, Hitachi High-Technologies Corporation y Vitesse Semiconductor. La lista de los miembros actuales de SATA-IO se puede encontrar en la página oficial de SATA-IO. El número actual de miembros es de 206 compañías que incluyen a todas las compañías conocidas del mundo informático, ya sea de software como de hardware. Sun Microsystems, Hewlett-Packard, Samsung, IBM, etc.
Para hacerse miembro del SATA-IO hay que firmar el acuerdo de calidad de miembro (Membership Agreement) y pagar una couta anual de $1,500 en las oficinas de SATA-IO.
Velocidades
Al referirse a velocidades de transmisión, conviene recordar que en ocasiones se confunden las unidades de medida, y que las especificaciones de la capa física se refieren a la tasa real de datos, mientras que otras especificaciones se refieren a capacidades lógicas.
La primera generación especifica en transferencias de 150 MB por segundo, también conocida por SATA 150 MB/s o Serial ATA-150. Actualmente se comercializan dispositivos SATA II, a 300 MB/s, también conocida como Serial ATA-300 y los SATA III, a 600 MB/s, que incluyen una velocidad de 600 MB/s estándar.
Las Unidades que soportan la velocidad de 3Gb/s son compatibles con un bus de 1,5 Gb/s.
En la siguiente tabla se muestra el cálculo de la velocidad real de SATAI 1.5 Gb/s y SATAII 3 Gb/s:
| SATA I | SATA II | SATA III | |
|---|---|---|---|
| Frecuencia | 1500 MHz | 3000 MHz | 6000MHz |
| Bits/clock | 1 | 1 | 1 |
| Codificación 8b10b | 80% | 80% | 80% |
| bits/Byte | 8 | 8 | 8 |
| Velocidad real | 150 MB/s | 300 MB/s | 600 MB/s |
En Noviembre del 2001, un grupo de fabricantes de hardware (explicado en la parte del trabajo SATA burocrático) crearon el Serial ATA Working Group para hacer frente a las necesidades de la próxima generación de interfaces. Posteriormente, en el 2004, cambiaron el nombre por el de Serial ATA International Organization (SATA-IO).
Por estas fechas, tras las mejoras de la especificación ATA-7, con la que se habían conseguido transferencias de 133 MB/s, el modelo tradicional de interfaz PATA ("Parallel ATA") empezaba a mostrar síntomas de agotamiento, después de haber prestado eficientes servicios desde su concepción inicial a mediados de los 80. Paralelamente, se habían conseguido grandes avances en el campo de las comunicaciones serie. En este ambiente, los esfuerzos se dirigieron a conseguir una nueva especificación de arquitectura serie para la interfaz ATA.
Como se muestra en la figura 1 la nueva arquitectura, conocida como Serial ATA (SATA), adopta una estructura de capas. La capa de órdenes es un superconjunto de la arquitectura ATA anterior; de forma que los nuevos dispositivos son compatibles con los protocolos ATA tradicionales, y son por tanto compatibles respecto a las aplicaciones existentes. Sin embargo la capa física es distinta, lo que representa un punto de ruptura en el sentido de que los nuevos dispositivos SATA no son compatibles con los anteriores. No obstante, la nueva arquitectura ofrece mejoras suficientes para poder justificar el cambio.
La idea es que los dispositivos ATA de cualquier tipo (serie o paralelo) compartan un juego común de órdenes, y organizar la conexión de estos dispositivos en una estructura donde existen direcciones, dominios y dispositivos concretos. Una organización que recuerda vagamente a la de Internet en la que está inspirada (un dominio ATA contiene un controlador host SATA y un dispositivo).
Capa física
Cada puerto, multiplicador, dispositivo o adaptador SATA o SAS ("Serial Attached SCSI") tiene un número de puerto único de 64 bits. Una especie de MAC o código de barras del producto con: un código NAA de 4 bits; un código de fabricante de 24 bits asignado por la autoridad normativa, y un código de dispositivo a disposición de cada fabricante de 36 bits.
Topología

SATA es una arquitectura "punto a punto". Es decir, la conexión entre puerto y dispositivo es directa, cada dispositivo se conecta directamente a un controlador SATA, así, cada dispositivo disfruta la totalidad del ancho de banda, de la conexión, sin que exista la sobrecarga inherente a los mecanismos de arbitraje y detección de colisiones como sucedía en los viejos PATA que las interfaces se segmentaban en maestras y esclavas.
El controlador host se encuentra embebido en la placa-base o instalado como una tarjeta en uno de sus zócalos, que actúa como puente entre los datos paralelos del bus y el dispositivo SATA. Existen controladores con más de una salida (generalmente 4 u 8) de forma que pueden conectarse varios dispositivos. También se han diseñado multiplicadores de puerto que permiten aumentar el número de conexiones en un puerto del controlador, con el fin de aumentar el número de dispositivos conectados.
Además de la tarea de serializar/paralelizar los datos, una parte importante del trabajo del controlador está relacionada con los protocolos de conexión y desconexión del periférico, que son bastante sofisticados en este tipo de interfaz, ya que está prevista la capacidad de conexión en caliente. El protocolo de conexión es capaz de identificar el tipo de dispositivo conectado; detectar si funciona correctamente; negociar la velocidad de la conexión, etc. La interfaz Serial ATA guarda ciertas similitudes con la interfaz USB, aunque SATA es mucho más rápida que aquella, y los dispositivos no se alimentan del propio bus.
Cables y conexiones
Los conectores y los cables son la diferencia más visible entre las unidades SATA y las PATA. Al contrario que los PATA se usa el mismo conector en las Unidades de almacenamiento de equipos de escritorio o servidores (3,5 pulgadas) y los de los portátiles (2,5 pulgadas). Esto permite usar las unidades de 2,5 pulgadas en los sistemas de escritorio sin necesidad de usar adaptadores a la vez que disminuyen los costes.
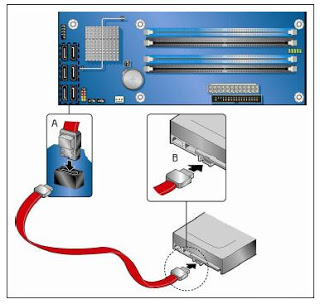
Por otra parte los dispositivos SATA tienen dos tipos de cables de conexión, de señal y de energía. La forma concreta depende de la posición relativa del dispositivo respecto al controlador host. A este respecto caben tres posibilidades:
- Dispositivo interno conectado directamente al controlador host.
- Dispositivo interno conectado a una salida del controlador host mediante cables de alimentación y señal.
- Dispositivo externo conectado al controlador host mediante un cable de señal. En este caso, el dispositivo dispone de su propia fuente de alimentación.
SATA Externo
Fue estandarizado a mediados de 2004, con definiciones específicas de cables, conectores y requisitos de la señal para unidades eSATA externas. eSATA se caracteriza por:
- Velocidad de SATA en los discos externos (se han medido 115 MB/s con RAID externos)
- Sin conversión de protocolos de PATA/SATA a USB/Firewire, todas las características del disco están disponibles para el anfitrión.
- La longitud de cable se restringe a 2 metros; USB y Firewire permiten mayores distancias.
- Se aumentó la tensión de transmisión mínima y máxima a 500mV - 600mV (de 400 mV - 600 mV)
- Voltaje recibido disminuido a 240 mV - 600 mV (de 325 mV - 600 mV)
- Capacidad de disposición de los discos en RAID 0 y RAID
Actualmente, la mayoría de las placas bases han empezado a incluir conectores eSATA, también es posible usar adaptadores de bus o tarjetas PC-Card y CardBus para portátiles que aun no integran el conector.
Alternativas
También en SCSIW se está preparando un sistema en serie, que además es compatible con SATA, esto es, se podrán conectar discos SATA en una controladora SAS (Serial Attached SCSI). El Serial ATA transfiere los datos por un bus de 7 hilos mucho más delgado y fino que el anterior Parallel ATA que lo hacía por uno de 80 o 40 hilos, lo que permite una mayor circulación de aire en ventilación dentro del equipo disminuyendo así su calentamiento interno y externo.
| ||
| Tipo | masivo interno | |
|---|---|---|
| Historia de producción | ||
| Diseñado en | 2003 | |
| Sustituye a | ATA o IDE | |
| Especificaciones | ||
| Conectable en caliente | Si, con soporte de otros componentes del sistema. | |
| Externo | Si, con eSATA. Y por USB, con case o caja externa. | |
| Cable | Cable plano | |
| Pines | 7 | |
| Patillaje | ||
| Pin 1 | GND | Tierra |
| Pin 2 | HT+/DR+ | Transmisión diferencial + |
| Pin 3 | HT-/DR- | Transmisión diferencial - |
| Pin 4 | GND | Tierra |
| Pin 5 | HR-/DT- | Recepción diferencial - |
| Pin 6 | HR-/DT+ | Recepción diferencial + |
| Pin 7 | GND | Tierra |

Serial ATA o SATA (acrónimo de Serial Advanced Technology Attachment) es una
0 comentarios